Характеристики приемника:
- Микроконтроллер STM32F100C8T6 на частоте 24МГц
- Импульсный стабилизатор напряжения
- Питание от 6 до 18В
- Совместимость с проектом автопилота МозголЁт
- Передача телеметрии по обратному каналу
- Радиочастотная часть: RFM22В
- Выходная мощность +20dbm либо +32 dbm если собран бустер
- Чувствительность -120 dbm
- 2 АЦП входа (датчик ВС, Тока)
- 8 PWM каналов
- S.BUS цифровая шина выход/вход + 6 стандартных PWM
- Поддержка сервохабов проекта МозголЁт
- Подстройка несущей частоты для совместимости с передатчиков
- Прыжки по частотам
- Диапазон частот 433-445МГц
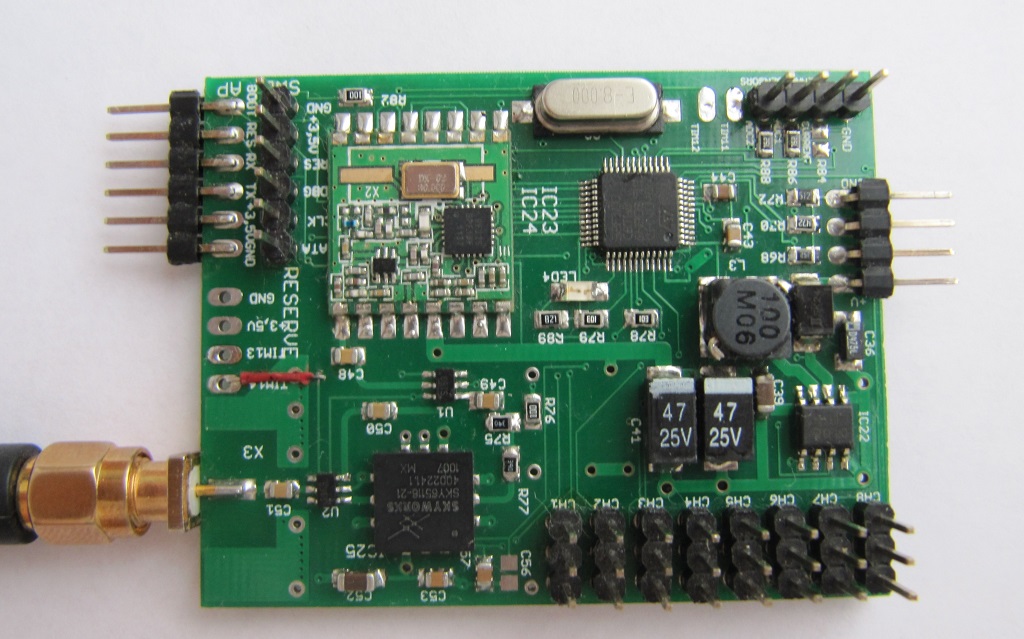
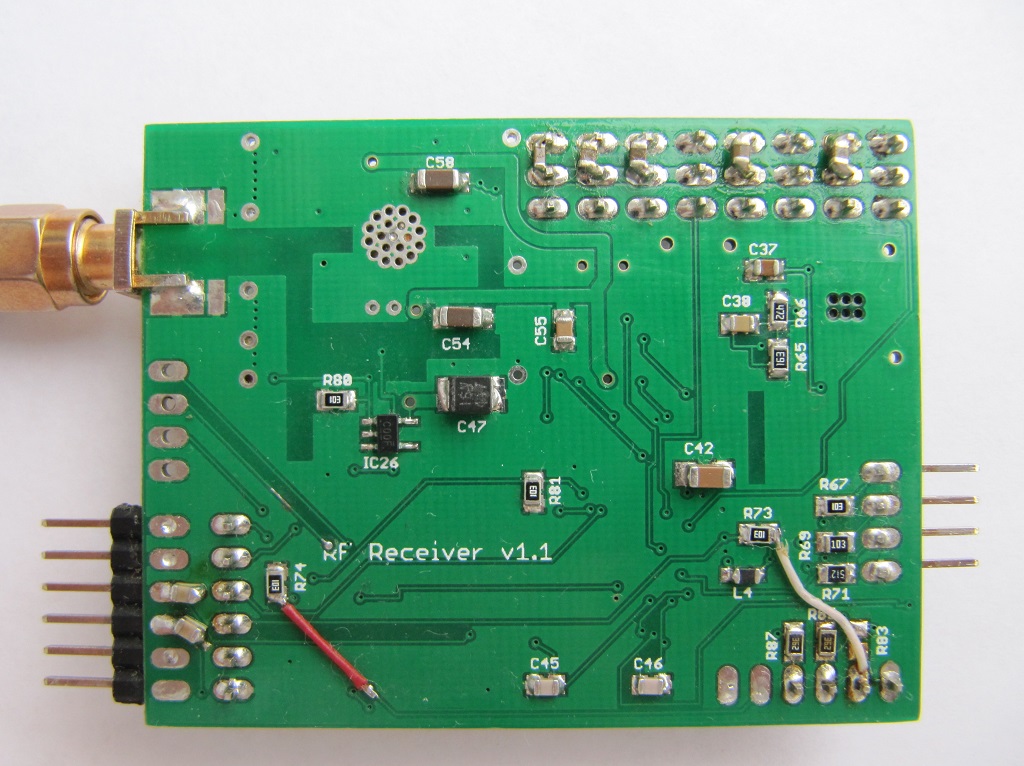
На текущий момент существует две версии платы приемника. К сожалению, обе версии промаркированы как V1.1 На фото выше показана собранная плата первой версии.
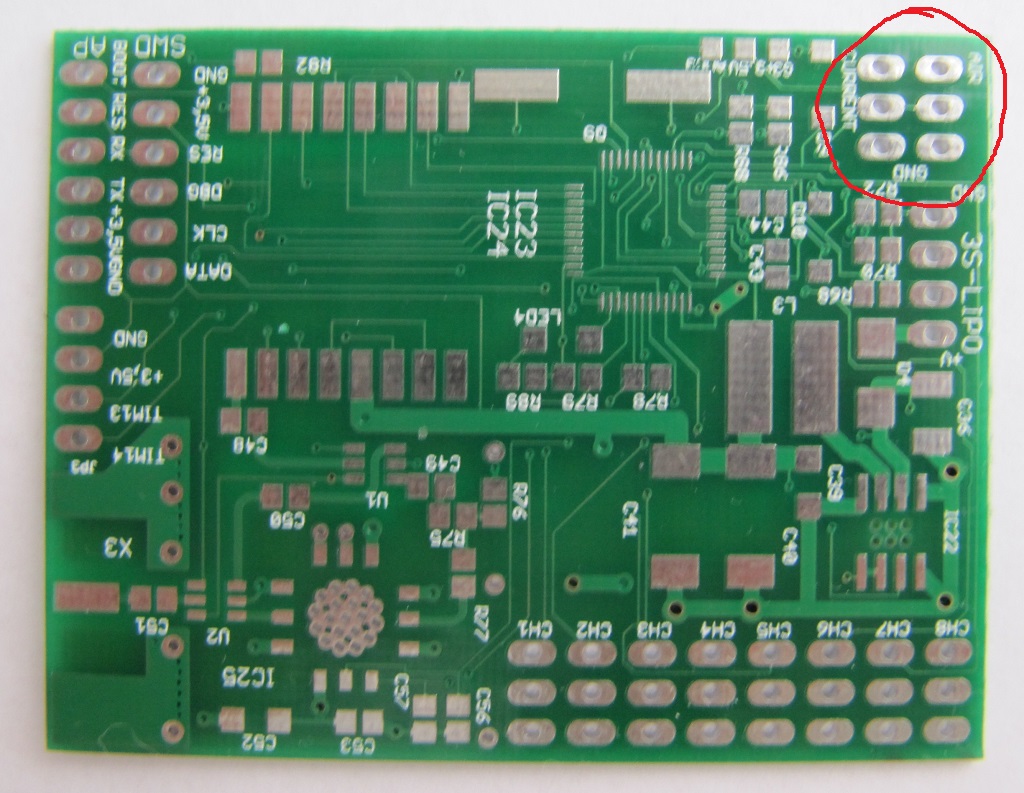
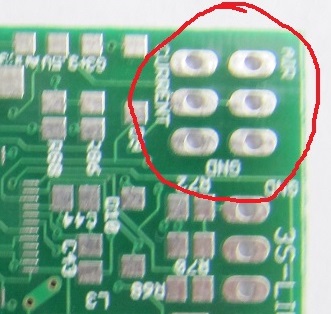
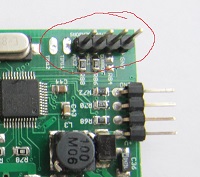
На фотографиях выше показана разница между PCB двух версий. Разница обведена красным маркером. Наиболее свежая версия отличается конфигурацией разъема сенсеров, расположенного рядом с разъемом под питание от батареи. Старая версия имеет 6 пиновый разъем в один ряд. Вторая версия имеет два разъема по 3 штрырька.
Полный набор фотографий качать отсюда:
rcv_photos.7z.001
rcv_photos.7z.002
rcv_photos.7z.003
rcv_photos.7z.004
rcv_photos.7z.005
Исходники схемотехники и герберы для изготовления плат находятся вместе с архивом АП.
Ссылка для скачивания здесь. Пароль архива: flybrain
Обе версии платы требуют некоторых патчей проводами.
Первая версия требует следующих патчей:
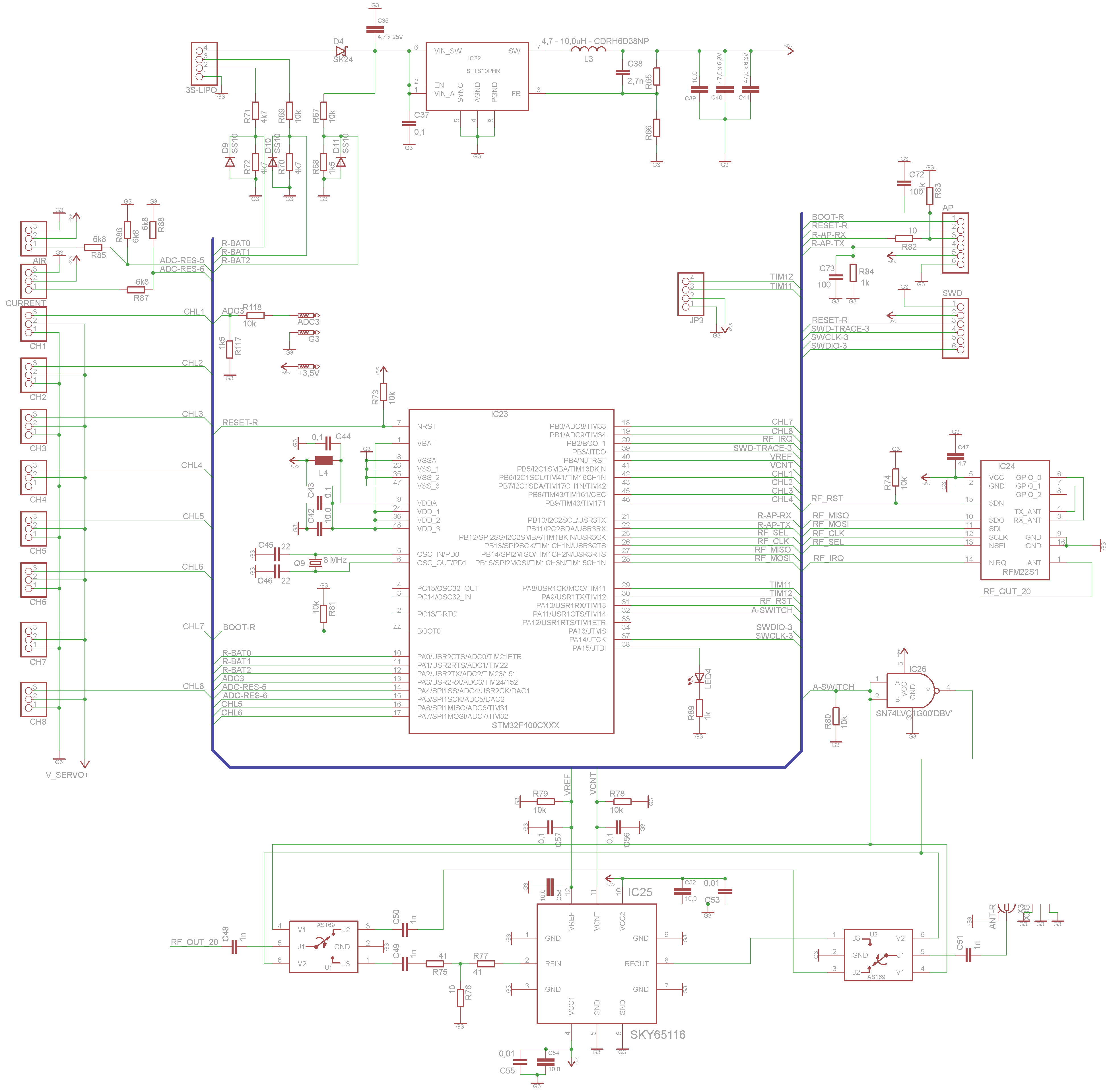
- Удалить резисторы R83, R84. Подать +3,5V на второй контакт разъема PLANE-SENSORS. Туда разведен резистор R83. Этот патч показан на фото
- Сигнал A-SWITCH подать на ногу 32 микроконтроллера. Этот сигнал обозначен как TIM14. См. фото и схему из архива
- Сигнал RF_RST подать на 29 ногу микроконтроллера. Этот сигнал обозначен как TIM11. См. фото и схему из архива
Далее необходимо добавить два провода, которые позволят программировать приемник по UART интерфейсу через АП. На фото эти патчи не показаны, так как я заливаю прошивку через J-LINK дебаггер.
-TIM12 (нога 30 микроконтроллера) замыкается с сигналом R_AP_RX разъема к АП
-TIM13 (нога 31 микроконтроллера) замыкается с сигналом R_AP_TX разъема к АП
Вторая версия требует следующих патчей:
- разорвать сигнал идущий от 31 ноги микроконтроллера к RF_RST RFM22B
- сигнал RF-RST (15 нога RFM22) подать на 29 ногу микроконтроллера(сигнал TIM11)
Если необходимо иметь возможность программирования приемника через АП, то делаем следующие патчи:
-TIM12 (нога 30 микроконтроллера) замыкается с сигналом R_AP_RX разъема к АП
-TIM13 (нога 31 микроконтроллера) замыкается с сигналом R_AP_TX разъема к АП
На печатной плате второй версии я забыл стереть старую маркировку сигналов, поэтому под меткой TIM13 находится реальный сигнал TIM11. А под меткой TIM14 находится реальный сигнал TIM12.
Подключение датчиков
На плату приемника можно подключить датчик тока и датчик воздушной скорости. Конструкция датчиков описана на странице схемотехники АП. Особенностью является то. что плата приемника не вырабатывает 5В, поэтому на датчике тока надо собирать местный стабилизатор на 5В (он разведен на плате датчика). И для датчика ВС также необходимо собирать STEP-UP регулятор, который тоже разведен уже на плате самого датчика.
В приемник первой версии датчик ВС включается трехштырьковым разъемом типа МАМА. Затем остается 1 штырек (см. фото), на который подается сигнал от датчика тока. Земля датчика тока, подается от батареи либо колхозится отдельно на один из свободных земляных штырьков приемника.
В приемнике второй версии под датчики предусмотрены штатные 3ех штырьковые разъемы. Если датчик тока запитывается +5В стабом на самом датчике, то средний провод (красный +5В) подключать НЕЛЬЗЯ. Он должен быть удален в датчике. Иначе вы звмкнете +5В датчика тока с +3,5В приемника и будет пшик!
Рекомендации по сборке.
Сначала на приемнике собирается импульсный стабилизатор. Он рассчитан на выработку 3,6 - 3,5В для тока 1,2А. Такой ток необходим в случае. если планируется устанавливать бустер обратного канала SKY65116. Дроссель должен быть защищенным, например CDRH тип производителя SUMIDA и рассчитан на ток до 1,5А. Конденсаторы C40 и C41 должны быть танталом LOW ESR. На выходе стаб должен выдавать 3,5 - 3,6В. Такое напряжение обусловлено тем, что приемник будет запитывать АП, до которого через проходной диод дойдет только 3,3В. После сборки стаба, необходимо подключить резистор 3 Ом (10W) и проверить способность стаба вырабатывать 1,1А на постоянной нагрузке и не перегреваться. При необходимости можно уменьшить общую емкость C40 и C41 до 47,0 - 22,0 мкф, а также уменьшить индуктивность дросселя до 4,7 мкГн.
Добившись необходимой работы стаба, можно запаивать микроконтроллер и RFM22В. Тип микроконтроллера в приемнике - STM32F100C8T6.
Теперь можно припаять кусок провода в качестве антенны и залить прошивку. Если, есть собранный передатчик, то можно пройти процедуру БИНДа и убедиться, что приемник и передатчик видят друг друга.
Запайка AS169 и SKY65116 является опцией усиления обратного канала. В принципе все будет работать и без усилителя. В этом случае антенный фидер (кабель RG178 или RG176) паяется прямо к выходу радиомодуля RFM22. Если же собирается бустер, то кабель паяется на штатное место, разведенное с краю платы.
Категорически запрещается гонять усилитель без антенны, это убьет его очень быстро. Кроме того, из-за большой мощности на максимуме усиления приемник может испытывать проблемы с ЭМС при использовании плохой антенны без хорошего противовеса. Без противовеса, земляная шина приемника получает не плохой электромагнитный удар в момент передачи, что может даже вызвать зависание МК. Рекомендуется использовать диполь в качестве антенны. Противовес диполя работает удовлетворительно. Однако нельзя трогать антенну руками в момент передачи, это портит качество излучения антенны.
Рекомендуется не гонять обратный канал на максимальной мощности до тех пор пока вы не научитесь создавать достаточную электромагнитную защиту на борту своего самолета. Не забывайте, что излучение 1,5 ватт обратного канала на частоте 433МГц может сказаться весьма печально на всей бортовой аппаратуре. Наводки полезут везде, будьте готовы с этим бороться.
Мощность обратного канала программируется через меню передатчика. Рекомендуется первое время использовать +20dbm. После понимания процесса, переходить на +24dbm, а уже только после этого пробовать максимум на +32dbm.
В качестве напряжения питания подается напряжение с ходовой батареи. Допускается входное напряжение до +18В. Напряжение подается на два крайних штырька разъема питания. Два средних штырька рассчитаны на случай включения балансировочного разъема батареи 3S. Однако пока программно поддерживается мониторинг напряжения через АЦП только с крайнего штырька разъема. Если батарея 4S, то подавать на 2 средних штырька напряжения с балансировочного разъема нельзя. Будьте внимательны с делителями напряжений АЦП, они рассчитаны на некоторое максимальное напряжение, превышать которое нельзя.
В режим БИНДа приемник вводится замыканием сигналов CH7 - CH8 и подаче питания.
Подробную инструкцию пользователя я опубликую в виде PDF документа.